新聞中心
日前,行易道關于SAR(合成孔徑雷達)成像技術車載應用的兩篇論文分別被IEEE MTT-S(微波理論與技術協會)主辦的第六屆智能移動微波國際會議(ICMIM 2020,奧地利,7月)和第11屆IEEE傳感器陣列和多通道信號處理國際會議(IEEE SAM 2020,杭州,6月)錄用,并受邀赴會演講。
“Implementation of Real-time Automotive SAR Imaging” 《汽車SAR實時成像的實現》
“Intelligent Parking Space Detection Based on Automotive SAR” 《基于汽車SAR成像的智能車位識別》
早在2016年行易道實現并發布了第一代79GHz車載SAR成像雷達系統,并在2018年公開發布在車載狀態下對非合作目標實時成像成果。2019年行易道經過近千公里不同場景的路試完成了對SAR應用場景的驗證,實現了第二代79GHz SAR - 車載近距成像雷達SSAR的研制。

論文詳述了利用車載短程調頻連續波(FMCW)雷達實現的汽車合成孔徑雷達(SAR)系統及其處理算法。該算法將波數域的高精度聚焦算法和利用車輛速度和角速度信息的運動補償結合起來,實現車載SAR任意行駛狀態下的實時高分辨率成像。
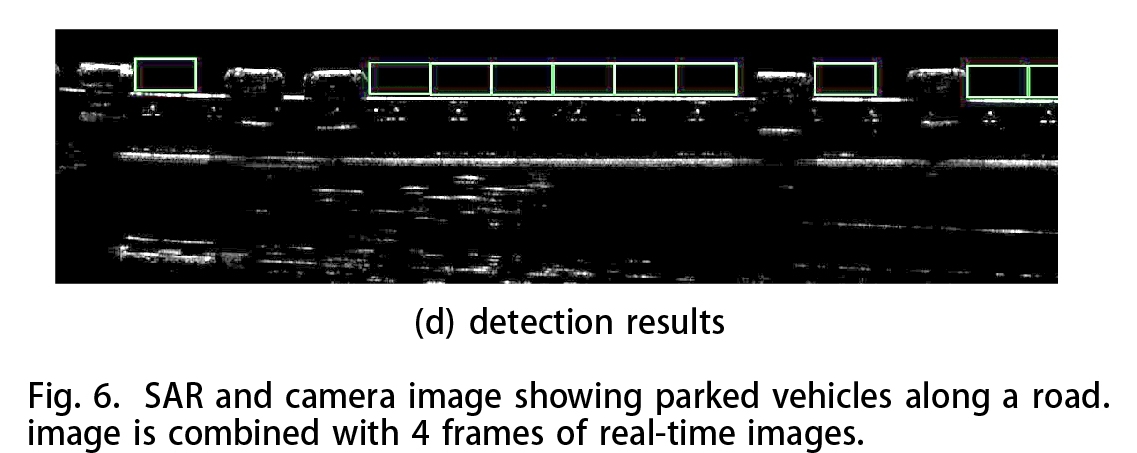
行易道已通過車載周圍環境測試結果證明,SAR是滿足汽車工業成像雷達要求的一種可行方案。應用FMCW-SAR技術,實現路邊場景的實時二維成像,從獲得的SAR圖像中識別靜止目標和判斷距離,這有助于車輛及時應對復雜的交通狀況。在車載SAR實時成像過程中,車輛可以4公里/小時至120公里/小時的速度沿直線和曲線路徑行駛。
截止到2019年下半年,行易道車載SAR已經積累了近千公里不同場景的道路數據。通過對大量室內外路試數據的評估,停車場場景成為行易道車載SAR的核心研發方向。在高分辨率SAR圖像中,車輛和可用停車位在視覺上易于區分。因此,基于79GHz車載SAR系統的智能車位檢測方案已被驗證可行并持續開發。
現有的采用超聲波傳感器或攝像機的自動泊車系統在面對不利光照或復雜障礙物條件時有一些局限性。另一方面,超聲波傳感器還具有探測距離短、精度低等局限性,如果沒有兩輛相鄰的車輛,超聲波傳感器就無法幫助車輛識別停車位進行自動泊車。為了擴展泊車應用場景和提升檢測精度,基于激光雷達和運動立體(motion stereo)的方案也會被采用,但由于傳感器或算法成本的原因,這些方法目前仍難以應用于量產汽車。
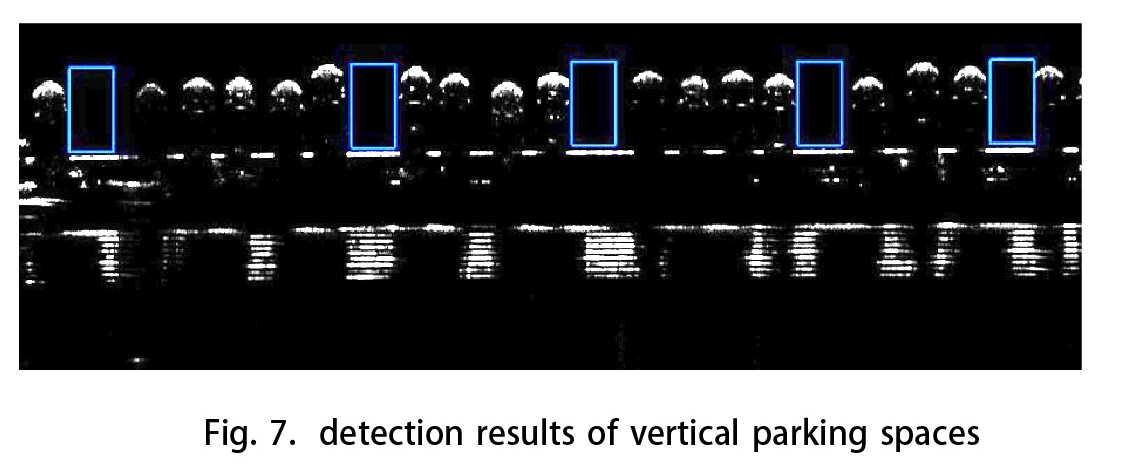
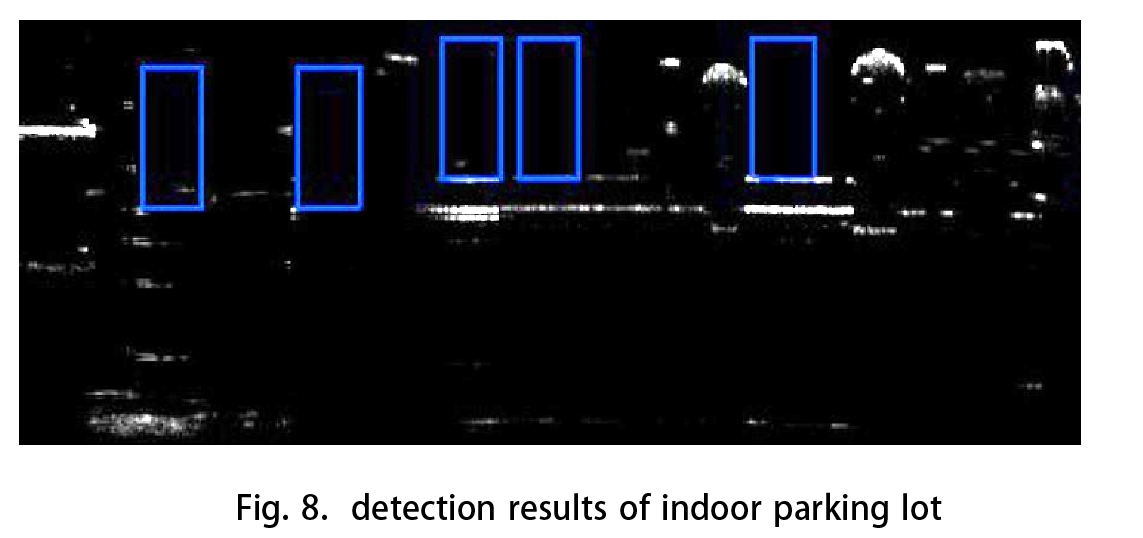
而基于79GHz車載SAR系統的智能車位檢測方案能夠以較低的硬件成本提供高分辨率的雷達圖像。通過實時圖像處理和邏輯決策,可為駕駛員提供停車信息,包括可用停車位、障礙物分布和尺寸、車輛位置及其相對距離和位置。
行易道79GHz車載SAR智能車位檢測系統有幾個突出的特點。首先,它不僅能像超聲波雷達一樣檢測兩車之間的停車位,還能檢測空曠場地的停車位。因此,自動停車場景可以擴展到住宅區、路邊停車場和開放式停車場。其次,基于車載SAR的停車位識別對車速和接近距離沒有要求。最后,基于SAR圖像的停車位檢測方法可以適應任何停車方向。

 官方微信
官方微信
